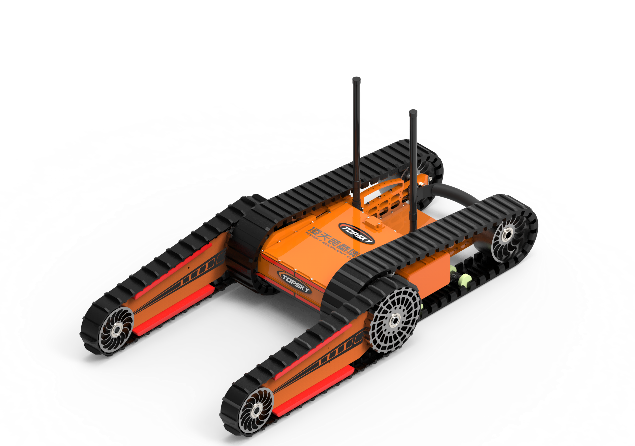
RXR-C10D Robot pequeño de reconocimiento de incendios


| Los robots de reconocimiento de incendios se utilizan principalmente para reemplazar la exploración manual de entornos inflamables, explosivos, complejos y otros entornos hostiles, con el fin de realizar reconocimientos ambientales y detectar gases. También pueden utilizarse para el reconocimiento en espacios reducidos y bajos, como la parte inferior de la carrocería de un automóvil o la base de una estantería. El chasis adopta una estructura de orugas con doble brazo oscilante delantero, capaz de superar obstáculos verticales de hasta 280 mm y de subir plataformas de hasta 360 mm, adaptándose así a diversos terrenos para un despliegue rápido en combate. La interfaz de expansión multifuncional permite la incorporación de diferentes módulos de carrocería. Además, el robot cuenta con control por cable, lo que le permite operarlo de forma remota incluso en caso de interferencia de señal. Los brazos oscilantes dobles del robot son desmontables, lo que posibilita su uso en diversos escenarios. |
| 2.Características |
| 1. Control remoto inteligente. Botón de expansión multifunción. Funcionamiento visualizado en pantalla grande 2. Modularización de toda la máquina Modularización del chasis, modularización de la batería, modularización de la suspensión. 3. Excelente desempeño en escalada, subir escaleras, superar obstáculos y cruzar zanjas. Puede subir pendientes de 45 grados. Puede subir escaleras con una inclinación de 40 grados. Puede superar obstáculos verticales de 28 cm. Puede abarcar zanjas de 41 cm de ancho. 4. Sistema de vídeo Modo de comunicación de 3 puntos, para resolver operaciones normales en entornos no visuales, distancia de comunicación de 1 km. Cámara HD de 2 canales 5. Múltiples módulos de expansión Módulo LiDAR, módulo de detección de gas, módulo cardán de reconocimiento, módulo de brazo robótico
Cuatro puertos de conexión para aviación extendidos, RS232, RS485, CAN, puerto de red reservado, 24 V, 12 V (normalmente cerrado).
|
| 3.Tparámetros técnicos3.1 El robot completo: 1. Nombre: Robot pequeño de reconocimiento de incendios RXR-C10D (B) 2. Modelo: RXR-C10D 3. Función básica: función de reconocimiento de vídeo 4. Nivel de protección: el nivel de protección de todo el robot es IP67. 5. Alimentación: eléctrica, batería de litio ternaria 6. Tamaño: ≤largo 610 mm × ancho 490 mm × alto 200 mm (sin antena) 7. Diámetro de giro: rotación en el mismo lugar 8. Peso: ≤25 kg 9. Velocidad lineal máxima: ≥2,7 m/s, control remoto de velocidad continua. 10. Importe de la desviación recta: ≤5% 11. Capacidad de escalada: ≥45° 12. Capacidad de escalada: ≥40° 13. Altura de los obstáculos de cruce: ≥280 mm 14. Tiempo de caminata continua: ≥2 horas 15. Distancia de control remoto inalámbrico: 500 m (en campo abierto) 16. Distancia de transmisión de video inalámbrica: 500 m (abierto) comunicación de dos puntos; 800 m (abierto) comunicación de tres puntos para cumplir con la escena de oclusión (opcional); 17. Distancia de control remoto con cable: 100 m 18. Distancia de transmisión de vídeo por cable: 100 m 19. Oruga robótica: La oruga robótica deberá estar fabricada de caucho ignífugo, antiestático y resistente a altas temperaturas, con Kevlar en el interior y diseño de protección contra descarrilamiento.
3.2 Percepción de vídeo por parte de robots: 1. Número y configuración de las cámaras: Las dos cámaras de alta definición instaladas en el cuerpo del robot permiten la visualización y el control simultáneos, y el entorno que rodea la escena se presenta de forma estable al control remoto, lo que facilita el control inalámbrico del robot y mejora considerablemente la eficacia en combate. 3.3 Parámetros de configuración del terminal de control remoto 1. Dimensiones: 362*188*40 (sin incluir la altura del balancín) 2. Peso total de la máquina: 2,5 kg 3. Pantalla: pantalla LCD de alto brillo de al menos 10 pulgadas, conmutación de señal de vídeo de 4 canales. 4. Plataforma del sistema de control: sistema operativo Windows 10 5. Tiempo de trabajo: 2 horas (continuas) 6. Funciones básicas: El control remoto y el monitor están integrados y son portátiles, lo que permite observar y controlar al mismo tiempo, y el entorno que rodea la escena se puede presentar de forma estable al operador remoto. (Función opcional) Visualización en tiempo real de la batería del vehículo y de la caja de control remoto, distancia recorrida y otra información, y permite controlar los movimientos de avance, retroceso y dirección del robot. El método de transmisión de datos es inalámbrico mediante señal encriptada. 7. Función de grabación y reproducción de vídeo: el vídeo se puede grabar en cualquier momento, el contenido grabado se guarda automáticamente y se puede reproducir directamente en el terminal de control remoto, o bien se puede copiar a otros dispositivos. 8. Función de control de marcha: Sí, un joystick permite el control flexible del robot para avanzar, retroceder, girar a la izquierda y girar a la derecha. 9. Conmutador de vídeo: Sí, conmutador de desplazamiento con reinicio automático. 10. Función de control de iluminación: Sí, interruptor de palanca.
4.4 Otros: Carrete de cable de comunicación de 100 m Longitud: 100 mm |
| 4.Configuración del producto |
| 1. Robot pequeño de reconocimiento de incendios RXR-C10D (B) 1 juego 2. Caja de control remoto (batería incluida) 1 juego 3. Cargador con control remoto (12,6 V) 1 unidad 4. Cargador para cuerpo de robot (25,2 V) 1 unidad 5. Antena de transmisión de imagen de 1,4 GHz (4 unidades) 6. Cable de comunicación, carrete de 100 metros, 1 unidad. 7. Herramientas auxiliares (1 juego) |